I’ve long advocated that teams diverse in thought are critical to mitigate our own internal biases. What is equally important is how we challenge ourselves to apply the same rigour to things that we know or with which we agree, as to things that we are learning or with which we might disagree. I’ve had a couple of great examples recently on perspectives with maps that I’d like to share.
Continue reading Different perspectives are importantPaint it Black
CW: grief, death
If I look hard enough into the setting sun My love will laugh with me before the morning comes
When Karl and I were first dating, we spent a lot of time in rock and metal clubs in the south of the UK. If there was one song that could drag us back to the dance floor even if we were already at the door of the club, it was Paint it Black by the Rolling Stones. We’d race back, go crazy and sing along before finally heading out with that great feeling of a good night out. It’s a track that’s been part of my walking music for the ultra marathons I did last year and it’s always evoked warm feelings of those early days.
Two decades later and I’m hearing the lyrics properly for the first time.
Continue reading Paint it BlackMaths to 18? Is this the way to make people data literate?
Rishi Sunak, the UK Prime Minister, has caused some waves in the past few days with one of his personal pledges that young people should have to study maths until 18. As he said himself in his speech:
“Every opportunity I’ve had in life began with the education I was so fortunate to receive and it’s the single most important reason why I came into politics: to give every child the highest possible standard of education.”
Rishi Sunak, January 2023
While on the surface this may seem like a great idea, critics have been keen to pull apart all the ways that compulsory maths education is either a bad thing (from Simon Pegg’s passionate rant about lack of focus on the arts, many people saying how much they hated maths at school) or simply won’t work (lack of qualified teachers or investment in schools, or even children going to school hungry). All of these criticisms have merit and I’m a big believer in ideas being criticised and pulled apart to get to something that works rather than biased idealism.
Continue reading Maths to 18? Is this the way to make people data literate?
Walking Ultra Marathons

Last year, I walked the Cancer Research Shine Night Walk full Marathon around London and raised just under £1000 in sponsorship for Cancer Research UK. Never one to do less than I’ve done previously, in 2022 I decided that one marathon wasn’t enough and to do justice to raising funds for this amazing charity I needed to up my game. Then I discovered ultra marathons!
Ember smart mug – is it worth it? Review
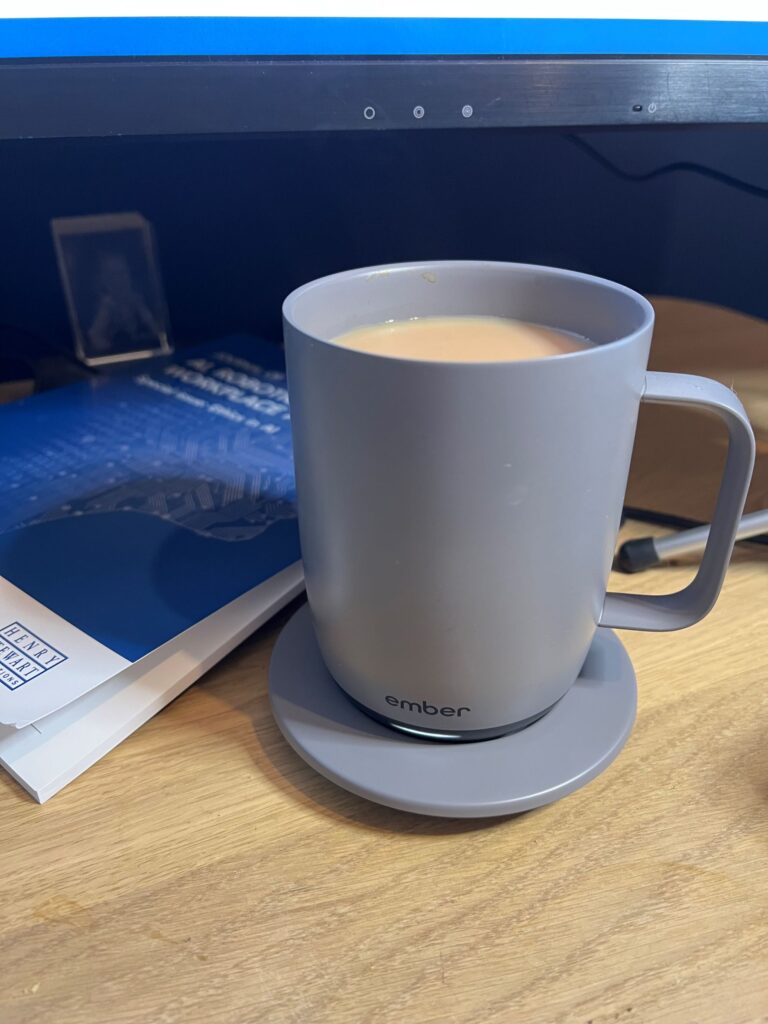
I am notoriously difficult to buy gifts for, and it’s something that my husband mentions regularly as I don’t really need anything, and I have all the computing, gaming and Lego I want1. This year he approached my birthday grinning that he had found me the prefect present… and he really had.
Corsair Keyboard Restoration
A few weeks ago, a friend of mine was asking about which was the best gaming keyboard to buy as theirs was “broken”. I knew that they had a pretty decent Corsair gaming keyboard and that they hadn’t had it all that long (maybe less than a year). The scientist in me immediately asked “In what way is it broken?”.
“The keys are sticking and often don’t register. I’m going to throw it away.”
Always one unable to resist a challenge and prevent something ending up in landfill if I can help, I offered to take a look to see if I could fix it. I wasn’t surprised at the state of it when it arrived. My friend often ends up eating and drinking at their desk during both work and gaming, and most people don’t clean their tech regularly, if at all.
Continue reading Corsair Keyboard RestorationMarathon Musings
A huge congratulations to everyone who ran the London Marathon yesterday. I, like many others, watched from the sofa as forty thousand ran the streets of London, raising money for some incredible causes. I want to shout out my friend Rob Wiles, who was raising money for Children with Cancer UK. As the TV coverage reminded me, there were even more people running “virtual” marathons around the world, for those who couldn’t (or chose not to) attend in person. This was something that Tim Peake set a precedent for when he ran the marathon from the International Space Station back in 2016 and I wonder if this will continue as an option should everything finally return to normal…
For once, while I was watching from my sofa, I felt enthusiastic empathy rather than jealousy at their fitness – my legs were only just back to normal after my own marathon the weekend before.
Continue reading Marathon MusingsCensus 2021 and data protection
Today is Census day in the England and Wales1. Happening every ten years, the census provides a snapshot of households across the country to help shape funding decisions and plan for future needs (schools/public services etc).
Continue reading Census 2021 and data protectionExplainable AI
Last week, I attended the Re Work Explainable AI mini summit. I am really loving so many great speakers being accessible online, particularly in a three to four hour format, which makes it easy to fit in around work commitments better than an in person summit – had it not been online I would have missed out on some great speakers.
Explainability is something I’ve been really focussing on recently. While it’s always been important, my frustration has been in research focussing on tools for machine learning engineers and not on clear explanations for the general public – the very people using, and being affected by, the systems we build. I was keen to attend this summit in particular as a refresh of where we were in terms of current best practise.
Continue reading Explainable AIAndrew Ng Fireside Chat with the RSS Data Science Section
On the 10th February the Royal Statistical Society Data Science Section were delighted to host a fireside chat with Andrew Ng, who shouldn’t need any introduction!
It was a great talk and one of my fellow committee members, James Weatherall, has already written a great blog post summarising the event. If you weren’t able to attend, the full session is now available on the RSS YouTube channel.
If you have any speaker suggestions that you’d like to see, please let me, or any of the committee, know!